iHelmsman船用自动导航系统设计旨在提升钓鱼者的体验。
功能模式
 船头固定
船头固定
 巡航
巡航
 漂流
漂流
 领航
领航
 航向固定
航向固定
 抛锚
抛锚
 环绕
环绕
 记录航线
记录航线
船头固定
使用内部指南针提供航向锁定。当船头固定开启时,它会让电机指向指南针方向。
亮点






精准定位
使用GPS/北斗/GLONASS三模全球定位系统,抗干扰能力强,定位精度小于2m。
领先的控制算法
通过姿态感应和即时调整算法,使船舶无论在各种天气条件下都能实现更严格的位置控制。
锚点平移
只需按下按钮,即可将抛锚的位置向前、向后、向左或向右移动1米。
持久续航
抛锚模式下,推进系统始终处于活动状态,通过在船只开始移动时立即进行校正,需要克服的惯性更小,因此电机消耗功率小也更小。
适配性强
通过对不同功率的电机进行算法微调和参数调整即可实现预期位置控制效果。
移动应用
支持蓝牙连接,可通过手机/平板App控制,界面友好,操作简单。
系统组成 01
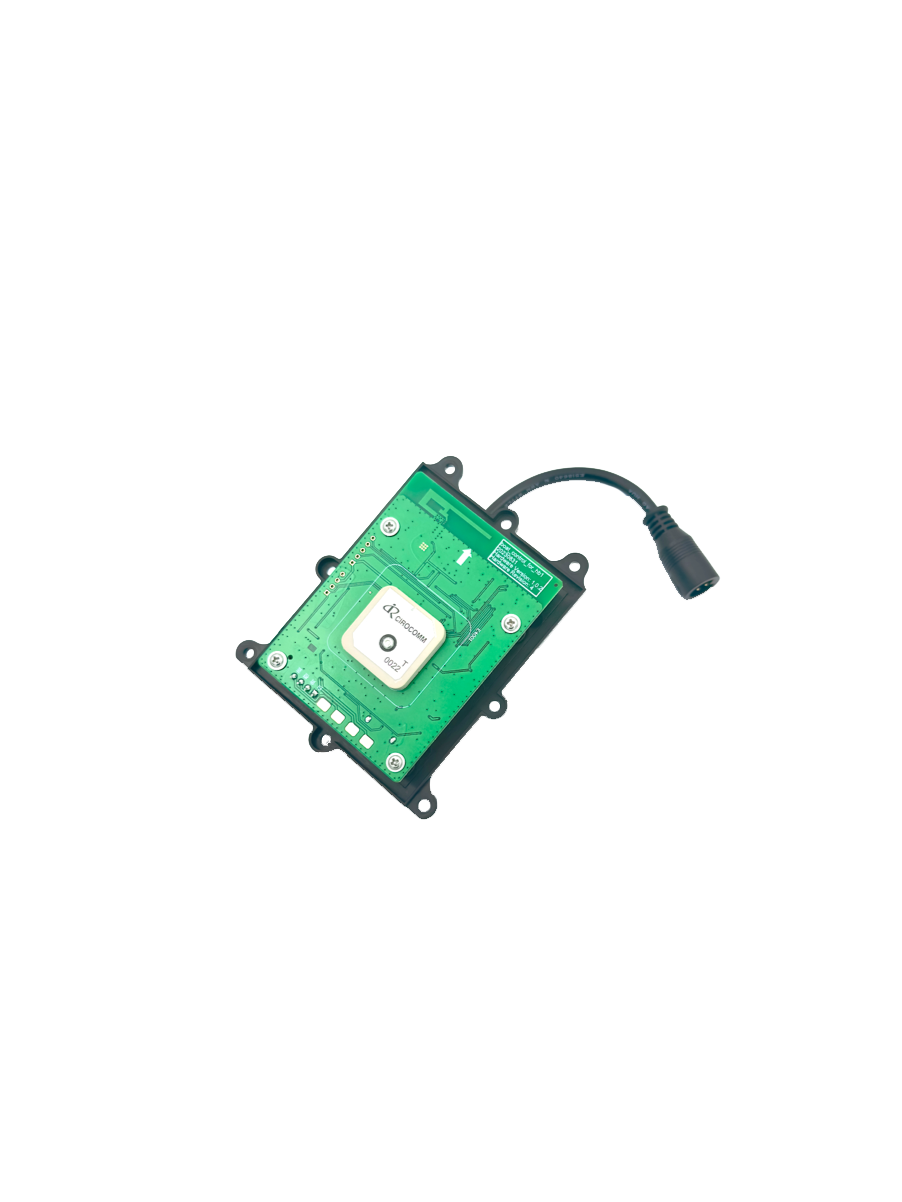
船控组件
作为系统的【大脑】,整合传感器数据与用户指令,通过算法决策实现船舶姿态控制与自主导航。

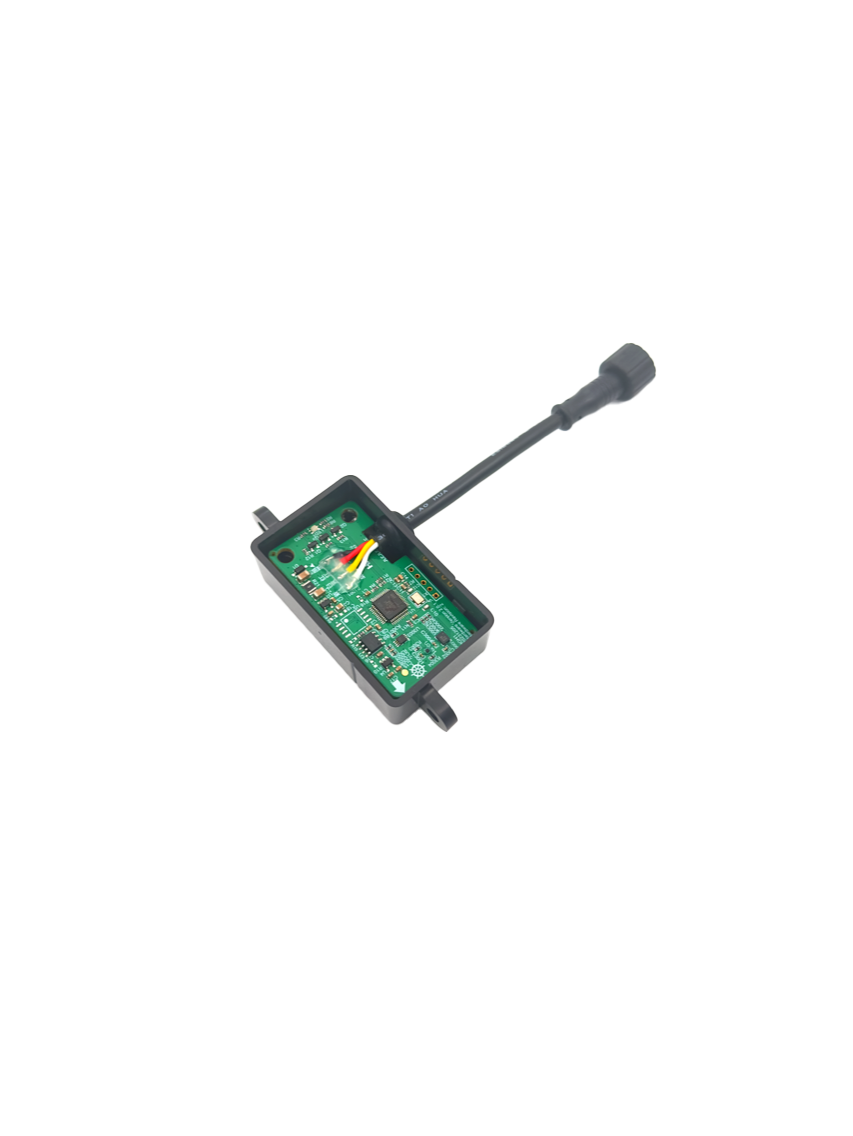
驱动组件
控制推进电机和转向,集成过流、过压、过热保护电路,实时监测电机状态并触发保护。
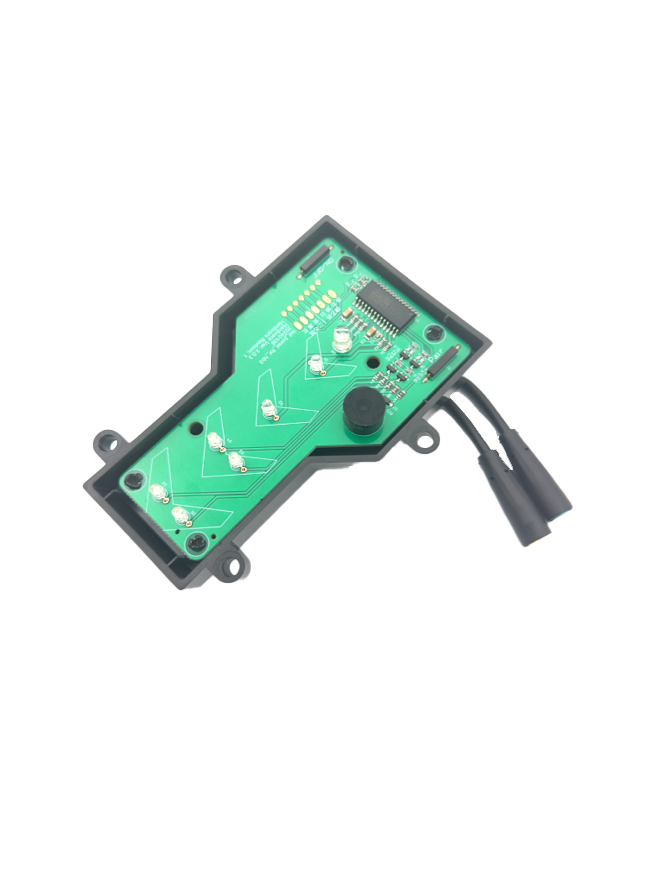
灯板组件
集成开关机、配对、蜂鸣器和状态指示灯功能。
航向传感器组件
通过IMU九轴姿态传感器检测船舶姿态,实现电子抛锚中平移锚点和弹簧线防缠绕功能。
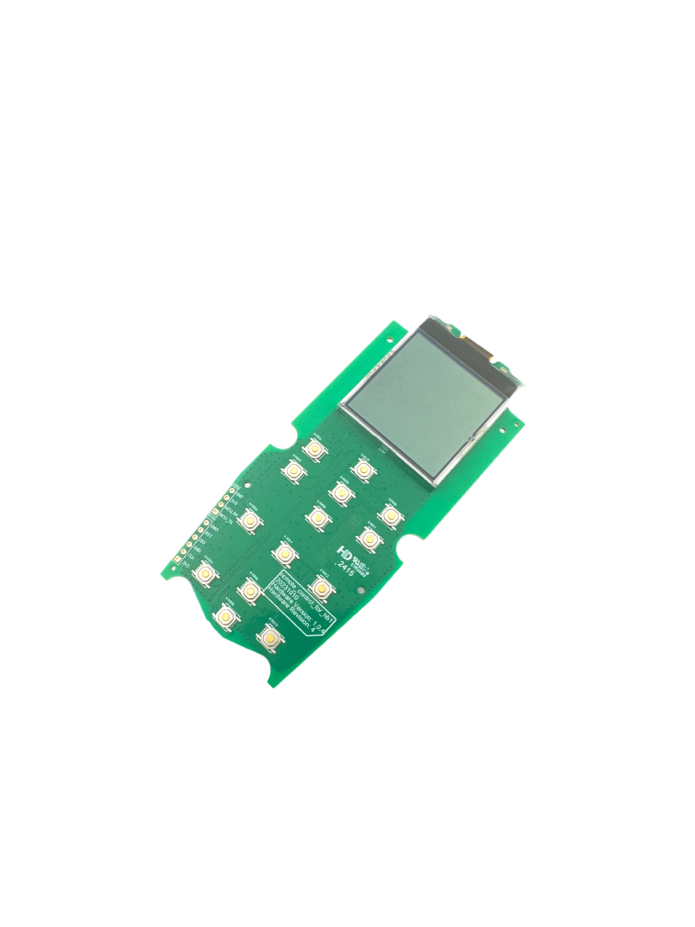
遥控组件
采用2.4GHz无线通信,实现低延迟指令传输、紧急制动、模式切换并配备背光显示屏显示设备状态。
02 03
05
